
摘要:Synchronous Queue 是一种特立独行的队列,其本身是没有容量的,比如调用者放一个数据到队列中,调用者是不能够立马返回的,调用者必须等待别人把我放进去的数据消费掉了,才能够返回。
本文分享自华为云社区《Synchronous Queue 源码解析》,作者: JavaEdge。
Synchronous Queue 是一种特立独行的队列,其本身是没有容量的,比如调用者放一个数据到队列中,调用者是不能够立马返回的,调用者必须等待别人把我放进去的数据消费掉了,才能够返回。Synchronous Queue 在 MQ 中被大量使用,本文就让我们从源码来看下 Synchronous Queue 到底是如何实现这种功能的呢。
不像ArrayBlockingQueue、LinkedBlockingDeque之类的阻塞队列使用AQS实现并发,SynchronousQueue直接使用CAS操作实现数据的安全访问,因此源码中充斥着大量的CAS代码。
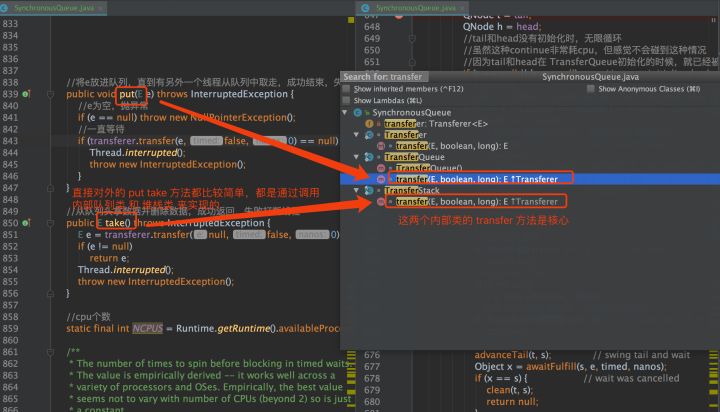
SynchronousQueue 的整体设计比较抽象,在内部抽象出了两种算法实现,一种是先入先出的队列,一种是后入先出的堆栈,两种算法被两个内部类实现,而直接对外的 put,take 方法的实现就非常简单,都是直接调用两个内部类的 transfer 方法进行实现,整体的调用关系如下图所示:
队列不存储数据,所以没有大小,也无法迭代;插入操作的返回必须等待另一个线程完成对应数据的删除操作,反之亦然;
队列由两种数据结构组成,分别是后入先出的堆栈和先入先出的队列,堆栈是非公平的,队列是公平的。
第二点是如何做到的?堆栈又是如何实现的呢?接下来我们一点一点揭晓。
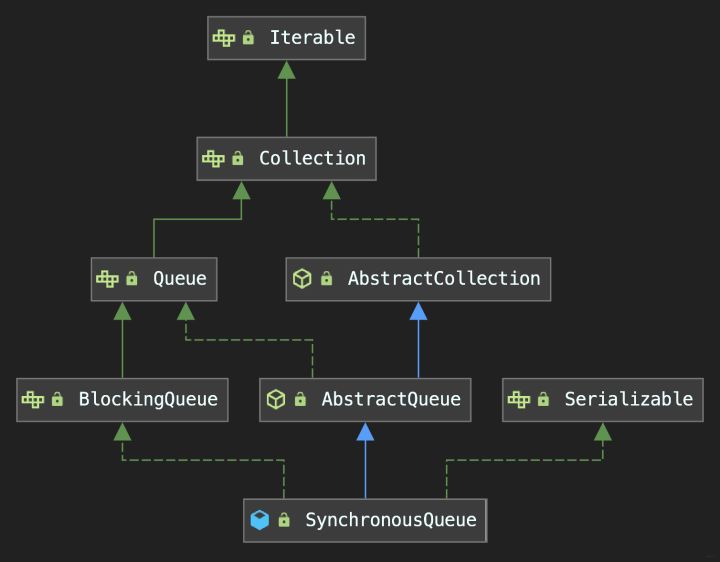
SynchronousQueue 整体类图和 LinkedBlockingQueue 相似,都实现了 BlockingQueue 接口,但因为其不储存数据结构,有一些方法是没有实现的,比如说 isEmpty、size、contains、remove 和迭代等方法,这些方法都是默认实现,如下截图:
SynchronousQueue 底层结构和其它队列完全不同,有着独特的两种数据结构:队列和堆栈,我们一起来看下数据结构:
// 堆栈和队列共同的接口 // 负责执行 put or take abstract static class Transferer<E> { // e 为空的,会直接返回特殊值,不为空会传递给消费者 // timed 为 true,说明会有超时时间 abstract E transfer(E e, boolean timed, long nanos); } // 堆栈 后入先出 非公平 // Scherer-Scott 算法 static final class TransferStack<E> extends Transferer<E> { } // 队列 先入先出 公平 static final class TransferQueue<E> extends Transferer<E> { } private transient volatile Transferer<E> transferer; // 无参构造器默认为非公平的 public SynchronousQueue(boolean fair) { transferer = fair ? new TransferQueue<E>() : new TransferStack<E>(); }
从源码中我们可以得到几点:
堆栈和队列都有一个共同的接口,叫做 Transferer,该接口有个方法:transfer,该方法很神奇,会承担 take 和 put 的双重功能;
在我们初始化的时候,是可以选择是使用堆栈还是队列的,如果你不选择,默认的就是堆栈,类注释中也说明了这一点,堆栈的效率比队列更高。
接下来我们来看下堆栈和队列的具体实现。
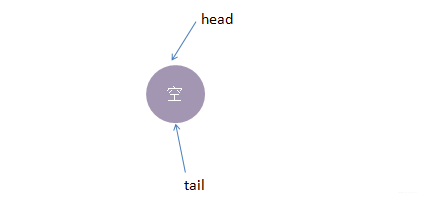
首先我们来介绍下堆栈的整体结构,如下:
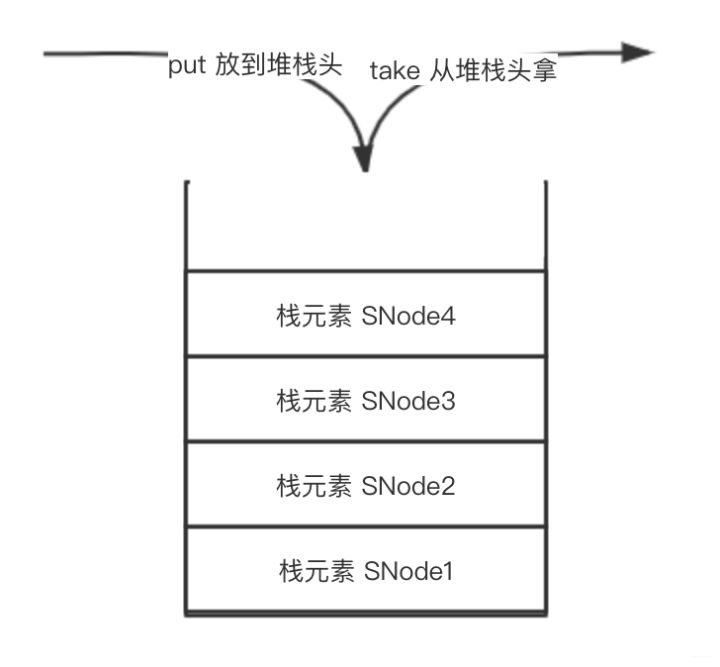
从上图中我们可以看到,我们有一个大的堆栈池,池的开口叫做堆栈头,put 的时候,就往堆栈池中放数据。take 的时候,就从堆栈池中拿数据,两者操作都是在堆栈头上操作数据,从图中可以看到,越靠近堆栈头,数据越新,所以每次 take 的时候,都会拿到堆栈头的最新数据,这就是我们说的后入先出,也就是非公平的。
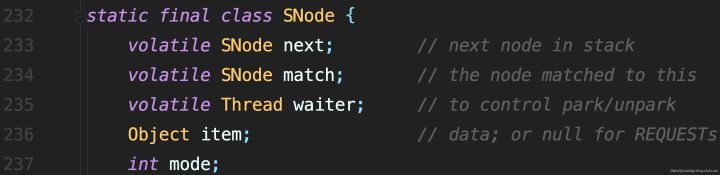
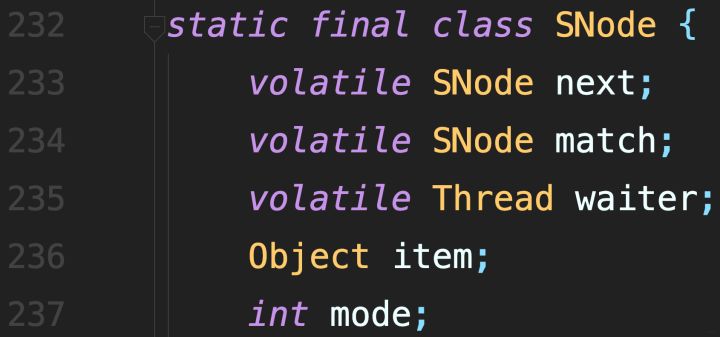
图中 SNode 就是源码中栈元素的表示,我们看下源码:
操作的对象都是堆栈头,虽然两者的一个是从堆栈头拿数据,一个是放数据,但底层实现的方法却是同一个,源码如下:
transfer 方法思路比较复杂,因为 take 和 put 两个方法都揉在了一起A
@SuppressWarnings("unchecked") E transfer(E e, boolean timed, long nanos) { SNode s = null; // constructed/reused as needed // e 为空: take 方法,非空: put 方法 int mode = (e == null) ? REQUEST : DATA; // 自旋 for (;;) { // 头节点情况分类 // 1:为空,说明队列中还没有数据 // 2:非空,并且是 take 类型的,说明头节点线程正等着拿数据 // 3:非空,并且是 put 类型的,说明头节点线程正等着放数据 SNode h = head; // 栈头为空,说明队列中还没有数据。 // 栈头非空且栈头的类型和本次操作一致 // 比如都是 put,那么就把本次 put 操作放到该栈头的前面即可,让本次 put 能够先执行 if (h == null || h.mode == mode) { // empty or same-mode // 设置了超时时间,并且 e 进栈或者出栈要超时了, // 就会丢弃本次操作,返回 null 值。 // 如果栈头此时被取消了,丢弃栈头,取下一个节点继续消费 if (timed && nanos <= 0) { // 无法等待 // 栈头操作被取消 if (h != null && h.isCancelled()) // 丢弃栈头,把栈头的后一个元素作为栈头 casHead(h, h.next); // 将取消的节点弹栈 // 栈头为空,直接返回 null else return null; // 没有超时,直接把 e 作为新的栈头 } else if (casHead(h, s = snode(s, e, h, mode))) { // e 等待出栈,一种是空队列 take,一种是 put SNode m = awaitFulfill(s, timed, nanos); if (m == s) { // wait was cancelled clean(s); return null; } // 本来 s 是栈头的,现在 s 不是栈头了,s 后面又来了一个数,把新的数据作为栈头 if ((h = head) != null && h.next == s) casHead(h, s.next); // help s's fulfiller return (E) ((mode == REQUEST) ? m.item : s.item); } // 栈头正在等待其他线程 put 或 take // 比如栈头正在阻塞,并且是 put 类型,而此次操作正好是 take 类型,走此处 } else if (!isFulfilling(h.mode)) { // try to fulfill // 栈头已经被取消,把下一个元素作为栈头 if (h.isCancelled()) // already cancelled casHead(h, h.next); // pop and retry // snode 方法第三个参数 h 代表栈头,赋值给 s 的 next 属性 else if (casHead(h, s=snode(s, e, h, FULFILLING|mode))) { for (;;) { // loop until matched or waiters disappear // m 就是栈头,通过上面 snode 方法刚刚赋值 SNode m = s.next; // m is s's match if (m == null) { // all waiters are gone casHead(s, null); // pop fulfill node s = null; // use new node next time break; // restart main loop } SNode mn = m.next; // tryMatch 非常重要的方法,两个作用: // 1 唤醒被阻塞的栈头 m,2 把当前节点 s 赋值给 m 的 match 属性 // 这样栈头 m 被唤醒时,就能从 m.match 中得到本次操作 s // 其中 s.item 记录着本次的操作节点,也就是记录本次操作的数据 if (m.tryMatch(s)) { casHead(s, mn); // pop both s and m return (E) ((mode == REQUEST) ? m.item : s.item); } else // lost match s.casNext(m, mn); // help unlink } } } else { // help a fulfiller SNode m = h.next; // m is h's match if (m == null) // waiter is gone casHead(h, null); // pop fulfilling node else { SNode mn = m.next; if (m.tryMatch(h)) // help match casHead(h, mn); // pop both h and m else // lost match h.casNext(m, mn); // help unlink } } } }
总结一下操作思路:
在整个过程中,有一个节点阻塞的方法,源码如下:
当一个 节点/线程 将要阻塞时,它会设置其 waiter 字段,然后在真正 park 之前至少再检查一次状态,从而涵盖了竞争与实现者的关系,并注意到 waiter 非空,因此应将其唤醒。
当由出现在调用点位于堆栈顶部的节点调用时,对停放的调用之前会进行旋转,以避免在生产者和消费者及时到达时阻塞。 这可能只足以在多处理器上发生。
从主循环返回的检查顺序反映了这样一个事实,即优先级: 中断 > 正常的返回 > 超时。 (因此,在超时时,在放弃之前要进行最后一次匹配检查。)除了来自非定时SynchronousQueue的调用。{poll / offer}不会检查中断,根本不等待,因此陷入了转移方法中 而不是调用awaitFulfill。
/** * 旋转/阻止,直到节点s通过执行操作匹配。 * @param s 等待的节点 * @param timed true if timed wait * @param nanos 超时时间 * @return 匹配的节点, 或者是 s 如果被取消 */ SNode awaitFulfill(SNode s, boolean timed, long nanos) { // deadline 死亡时间,如果设置了超时时间的话,死亡时间等于当前时间 + 超时时间,否则就是 0 final long deadline = timed ? System.nanoTime() + nanos : 0L; Thread w = Thread.currentThread(); // 自旋的次数,如果设置了超时时间,会自旋 32 次,否则自旋 512 次。 // 比如本次操作是 take 操作,自旋次数后,仍无其他线程 put 数据 // 就会阻塞,有超时时间的,会阻塞固定的时间,否则一致阻塞下去 int spins = (shouldSpin(s) ? (timed ? maxTimedSpins : maxUntimedSpins) : 0); for (;;) { // 当前线程有无被打断,如果过了超时时间,当前线程就会被打断 if (w.isInterrupted()) s.tryCancel(); SNode m = s.match; if (m != null) return m; if (timed) { nanos = deadline - System.nanoTime(); // 超时了,取消当前线程的等待操作 if (nanos <= 0L) { s.tryCancel(); continue; } } // 自选次数减1 if (spins > 0) spins = shouldSpin(s) ? (spins-1) : 0; // 把当前线程设置成 waiter,主要是通过线程来完成阻塞和唤醒 else if (s.waiter == null) s.waiter = w; // establish waiter so can park next iter else if (!timed) // 通过 park 进行阻塞,这个我们在锁章节中会说明 LockSupport.park(this); else if (nanos > spinForTimeoutThreshold) LockSupport.parkNanos(this, nanos); } }
可以发现其阻塞策略,并不是一上来就阻塞住,而是在自旋一定次数后,仍然没有其它线程来满足自己的要求时,才会真正的阻塞。
队列的实现策略通常分为公平模式和非公平模式,本文我们重点介绍公平模式。

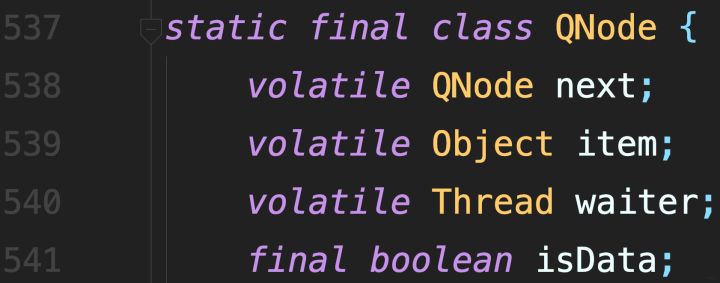
公平队列主要使用的是 TransferQueue 内部类的 transfer 方法,看源码:
E transfer(E e, boolean timed, long nanos) { QNode s = null; // constructed/reused as needed // true : put false : get boolean isData = (e != null); for (;;) { // 队列头和尾的临时变量,队列是空的时候,t=h QNode t = tail; QNode h = head; // tail 和 head 没有初始化时,无限循环 // 虽然这种 continue 非常耗cpu,但感觉不会碰到这种情况 // 因为 tail 和 head 在 TransferQueue 初始化的时候,就已经被赋值空节点了 if (t == null || h == null) continue; // 首尾节点相同,说明是空队列 // 或者尾节点的操作和当前节点操作一致 if (h == t || t.isData == isData) { QNode tn = t.next; // 当 t 不是 tail 时,说明 tail 已经被修改过了 // 因为 tail 没有被修改的情况下,t 和 tail 必然相等 // 因为前面刚刚执行赋值操作: t = tail if (t != tail) continue; // 队尾后面的值还不为空,t 还不是队尾,直接把 tn 赋值给 t,这是一步加强校验。 if (tn != null) { advanceTail(t, tn); continue; } //超时直接返回 null if (timed && nanos <= 0) // can't wait return null; //构造node节点 if (s == null) s = new QNode(e, isData); //如果把 e 放到队尾失败,继续递归放进去 if (!t.casNext(null, s)) // failed to link in continue; advanceTail(t, s); // swing tail and wait // 阻塞住自己 Object x = awaitFulfill(s, e, timed, nanos); if (x == s) { // wait was cancelled clean(t, s); return null; } if (!s.isOffList()) { // not already unlinked advanceHead(t, s); // unlink if head if (x != null) // and forget fields s.item = s; s.waiter = null; } return (x != null) ? (E)x : e; // 队列不为空,并且当前操作和队尾不一致 // 也就是说当前操作是队尾是对应的操作 // 比如说队尾是因为 take 被阻塞的,那么当前操作必然是 put } else { // complementary-mode // 如果是第一次执行,此处的 m 代表就是 tail // 也就是这行代码体现出队列的公平,每次操作时,从头开始按照顺序进行操作 QNode m = h.next; // node to fulfill if (t != tail || m == null || h != head) continue; // inconsistent read Object x = m.item; if (isData == (x != null) || // m already fulfilled x == m || // m cancelled // m 代表栈头 // 这里把当前的操作值赋值给阻塞住的 m 的 item 属性 // 这样 m 被释放时,就可得到此次操作的值 !m.casItem(x, e)) { // lost CAS advanceHead(h, m); // dequeue and retry continue; } // 当前操作放到队头 advanceHead(h, m); // successfully fulfilled // 释放队头阻塞节点 LockSupport.unpark(m.waiter); return (x != null) ? (E)x : e; } } }
线程被阻塞住后,当前线程是如何把自己的数据传给阻塞线程的。
假设线程 1 从队列中 take 数据 ,被阻塞,变成阻塞线程 A 然后线程 2 开始往队列中 put 数据 B,大致的流程如下:
在这个过程中,公平主要体现在,每次 put 数据的时候,都 put 到队尾上,而每次拿数据时,并不是直接从堆头拿数据,而是从队尾往前寻找第一个被阻塞的线程,这样就会按照顺序释放被阻塞的线程。
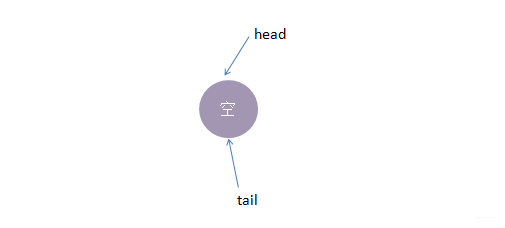
公平模式下,底层实现使用的是 TransferQueue 队列,它有一个head和tail指针,用于指向当前正在等待匹配的线程节点。
初始化时,TransferQueue的状态如下:
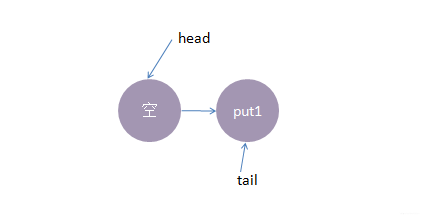
1.线程put1执行 put(1)操作,由于当前没有配对的消费线程,所以put1线程入队列,自旋一小会后睡眠等待,这时队列状态如下:
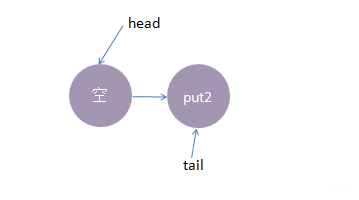
2.接着,线程put2执行了put(2)操作,跟前面一样,put2线程入队列,自旋一小会后睡眠等待,这时队列状态如下:

3.这时候,来了一个线程take1,执行了 take操作,由于tail指向put2线程,put2线程跟take1线程配对了(一put一take),这时take1线程不需要入队,但是请注意了,这时候,要唤醒的线程并不是put2,而是put1。
为何? 大家应该知道我们现在讲的是公平策略,所谓公平就是谁先入队了,谁就优先被唤醒,我们的例子明显是put1应该优先被唤醒。有的同学可能会有一个疑问,明明是take1线程跟put2线程匹配上了,结果是put1线程被唤醒消费,怎么确保take1线程一定可以和次首节点(head.next)也是匹配的呢?其实大家可以拿个纸画一画,就会发现真的就是这样的。
公平策略总结下来就是:队尾匹配队头出队。
执行后put1线程被唤醒,take1线程的 take()方法返回了1(put1线程的数据),这样就实现了线程间的一对一通信,这时候内部状态如下:
4.最后,再来一个线程take2,执行take操作,这时候只有put2线程在等候,而且两个线程匹配上了,线程put2被唤醒,take2线程take操作返回了2(线程put2的数据),这时候队列又回到了起点,如下所示:
以上便是公平模式下,SynchronousQueue的实现模型。总结下来就是:队尾匹配队头出队,先进先出,体现公平原则。

还是使用跟公平模式下一样的操作流程,对比两种策略下有何不同。
非公平模式底层的实现使用的是TransferStack,一个栈,实现中用head指针指向栈顶,接着我们看看它的实现模型:
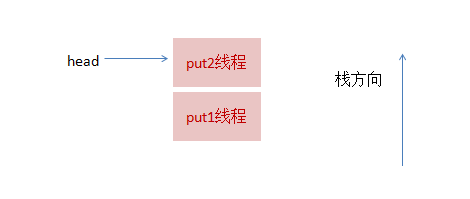
1.线程put1执行 put(1)操作,由于当前没有配对的消费线程,所以put1线程入栈,自旋一小会后睡眠等待,这时栈状态如下

2.接着,线程put2再次执行了put(2)操作,跟前面一样,put2线程入栈,自旋一小会后睡眠等待,这时栈状态如下:
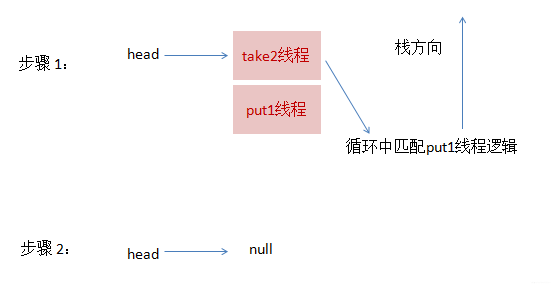
3.这时候,来了一个线程take1,执行了take操作,这时候发现栈顶为put2线程,匹配成功,但是实现会先把take1线程入栈,然后take1线程循环执行匹配put2线程逻辑,一旦发现没有并发冲突,就会把栈顶指针直接指向 put1线程
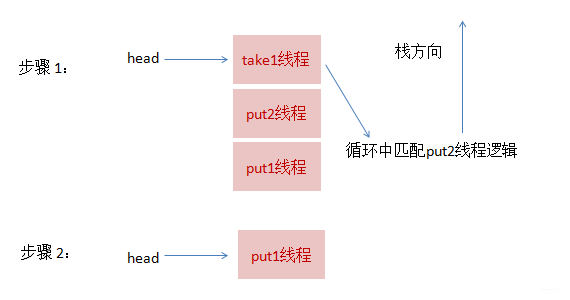
4.最后,再来一个线程take2,执行take操作,这跟步骤3的逻辑基本是一致的,take2线程入栈,然后在循环中匹配put1线程,最终全部匹配完毕,栈变为空,恢复初始状态,如下图所示:
可以从上面流程看出,虽然put1线程先入栈了,但是却是后匹配,这就是非公平的由来。
SynchronousQueue 源码比较复杂,建议大家进行源码的 debug 来学习源码,为大家准备了调试类:SynchronousQueueDemo,大家可以下载源码自己调试一下,这样学起来应该会更加轻松一点。
SynchronousQueue由于其独有的线程一一配对通信机制,在大部分平常开发中,可能都不太会用到,但线程池技术中会有所使用,由于内部没有使用AQS,而是直接使用CAS,所以代码理解起来会比较困难,但这并不妨碍我们理解底层的实现模型,在理解了模型的基础上,再翻阅源码,就会有方向感,看起来也会比较容易!





