
Xenomai4自2021年首个稳定版本发布以来已经相当长一段时间,那时仅在x86架构上简单的跑了跑,之后就再没关注过。近期,我愈发好奇Xenomai 4在ARM64平台上的实时性能表现,尤其是与Xenomai 3相比如何。恰逢周末空闲,盘一盘它。
本文不算教程,而仅仅是对在ARM64(具体为RK3588平台)上构建Xenomai 4 EVL过程的一次简要记录,希望能为感兴趣的读者提供些许参考。
0 环境说明
目标平台如下;
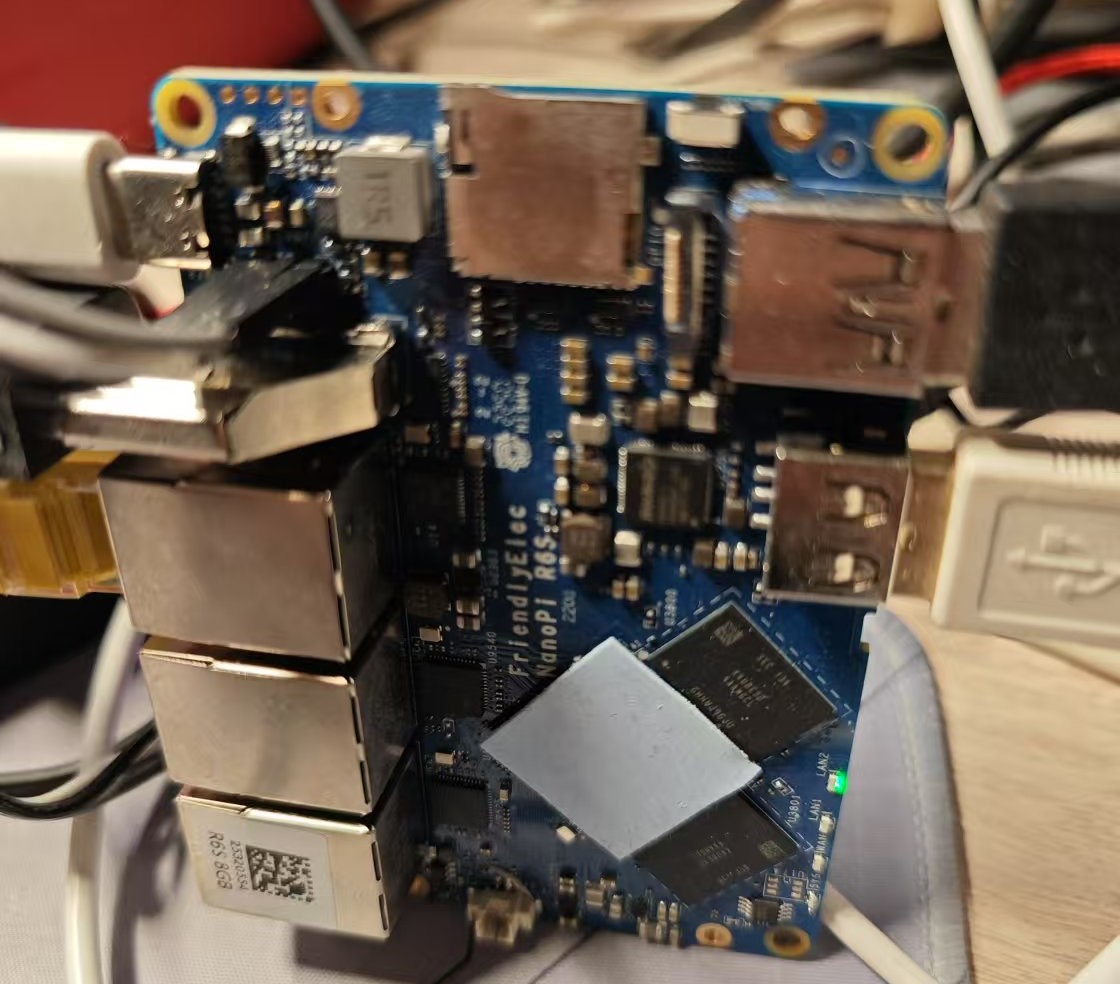
硬件平台 NanoPi R6C/R6S/T6
- SoC: Rockchip RK3588S、RK3588
- CPU: Quad-core ARM Cortex-A76(up to 2.4GHz) and quad-core Cortex-A55 CPU (up to 1.8GHz)
- GPU: Mali-G610 MP4, compatible with OpenGLES 1.1, 2.0, and 3.2, OpenCL up to 2.2 and Vulkan1.2
- VPU: 8K@60fps H.265 and VP9 decoder, 8K@30fps H.264 decoder, 4K@60fps AV1 decoder, 8K@30fps H.264 and H.265 encoder
- NPU: 6TOPs, supports INT4/INT8/INT16/FP16
- RAM: 64-bit 8GB LPDDR4X at 2133MHz
- Flash: 32GB eMMC, at HS400 mode
- Ethernet: one Native Gigabit Ethernet, and two PCIe 2.5G Ethernet
由于瑞芯微rk35xx系列SDK基本一致,所以也适用于其他rk3568、rk3562等硬件。
桌面发行版:ubuntu 24.04.1 LTS (Noble Numbat)
交叉编译环境:ubuntu 24.04 + rk3588-sdk-1.30(有需要该SDK的私信领取)
1 内核构建
基于瑞芯微rk3588构建evl内核。与xenomai3一样,xenomai4由以下部分组成:
-
linux内核:linux内核一般由厂商sdk提供。
-
dovetail补丁:这部分从xenomai官方仓库提取。
-
evl内核:这部分取自xenomai官方仓库(已包含dovetail和主线linux)。
- git@git.xenomai.org:Xenomai/xenomai4/linux-evl.git
- https://git.xenomai.org/xenomai4/linux-evl.git
-
libevl:用户空间库,供实时任务编程接口(目前还不支持posix)。
- git@git.xenomai.org:Xenomai/xenomai4/libevl.git
- https://git.xenomai.org/xenomai4/libevl.git


dovetail和evl是基于linux主线内核开发的,xenomai官方仓库已经提供了包含dovetail补丁+evl实时内核的仓库:https://source.denx.de/Xenomai/xenomai4/linux-evl。所以,如果厂商BSP内核已经完全上游化,我们直接拉这个仓库配置、编译安装内核即可,比如X86平台。
但是,我们使用的硬件是瑞芯微rk3588,目前瑞芯微rk3588的BSP还没有上游化,无法直接xenomai4的仓库,需要在厂商sdk linux内核上一步步添加,除linux内核外其余部分均从xenomai仓库中提取,这个方式就是xenomai4文档中说的树外构建。详细的参考xenomai4移植指南https://v4.xenomai.org/ports/和xenomai4开发流程https://v4.xenomai.org/devprocess/.
- 移植dovetail补丁,详见https://v4.xenomai.org/dovetail/porting/,同样由于ARM外设的多样性,对于主线内核没有的部分dovetail需要调整,编译安装-测试-修改-编译安装测试,这是一步一完善的过程。
- dovetail补丁测试通过后,从evl仓库中对应版本提取evl内核补丁,在1的基础上打evl内核补丁,解决补丁冲突。
- 编译配置,关于evl内核的配置说明详见https://v4.xenomai.org/core/build-steps/#core-kconfig
-> Kernel Features -> [*]EVL real-time core [*] Enable quota-based scheduling [*] Enable temporal partitioning policy (4) Number of partitions [ ] Optimize for intra-core concurrency [*] Collect runtime statistics [ ] Out-of-band networking (EXPERIMENTAL) Fixed sizes and limits ---> Pre-calibrated latency ---> [*] Debug support ---> - 编译安装内核
pi@NanoPi-R6S:~$demsg ... [ 2.119261] IRQ pipeline: high-priority EVL stage added. [ 2.119619] CPU6: proxy tick device registered (24.00MHz) [ 2.119625] CPU0: proxy tick device registered (24.00MHz) [ 2.119627] CPU7: proxy tick device registered (24.00MHz) [ 2.119633] CPU3: proxy tick device registered (24.00MHz) [ 2.119635] CPU4: proxy tick device registered (24.00MHz) [ 2.119638] CPU5: proxy tick device registered (24.00MHz) [ 2.119643] CPU2: proxy tick device registered (24.00MHz) [ 2.119649] CPU1: proxy tick device registered (24.00MHz) [ 2.120423] EVL: core started [DEBUG] ... pi@NanoPi-R6S:~$ uname -a Linux NanoPi-R6S 6.1.57-evl #2 SMP EVL Sun Dec 15 10:22:29 CST 2024 aarch64 aarch64 aarch64 GNU/Linux 关于实时外设,xenomai4的实时驱动与xenomai3不同,xenomai3内部有RTDM实时驱动框架,如果需要用到实时外设需要全新开发实时驱动,而xenomai4则是在linux原始驱动上添加实时处理路径(oob)来达到实时,这样不用重写整个驱动,有好处也有坏处,坏处是,每次更新升级内核,linux驱动可能会发生一些改变,这时候实时驱动也要跟着调整才能保证原来的实时性。
确认evl内核正常启动后,编译安装evl库,然后从应用层面再跑完整的测试,确定内核各组件工作是否正常。
2 库编译
构建libevl参考官方文档,以下基于官方文档操作。
libevl使用meson构建系统。Meson 项目为每个阶段(从编写构建规则到使用构建规则)发布了一份写得很好且有用的文档,ubuntu使用如下命令安装:
$ sudo apt install meson $ pip3 install ninja --break-system-packages meson基于通常的configure、compile和install步骤,启用通用的构建和安装过程。这些步骤始终在单独的构建树中进行,并由 强制执行meson(换句话说,不要尝试直接从libevl源代码树构建 - 这样做行不通,此外,这样做是个坏主意TM)。
首先,我们需要配置构建树libevl。通用语法如下:
$ meson setup [--cross-file <x-file>] [-Duapi=<kernel-uapi>] [-Dbuildtype=<build-type>] [-Dprefix=<prefix>] $buildir $srcdir | 参数变量 | 描述 |
|---|---|
| $buildir | 构建目录的路径(与 $srcdir 分开) |
| $srcdir | libevl源树的路径 |
| <prefix> | 安装信息前缀(安装路径为(DESTDIR/)prefix) |
| <build-type> | 构建类型,例如debug、debugoptimized或release |
| <x-file> | 一个meson 交叉编译文件定义构建环境 |
| <kernel-uapi> | 包含以下内容的内核源代码树的路径UAPI 标头 |
方式1 交叉编译
建立一个meson交叉配置文件rk3588-aarch64-linux-gnu.txt
[binaries] c = 'aarch64-linux-gnu-gcc' cpp = 'aarch64-linux-gnu-g++' ar = 'aarch64-linux-gnu-ar' strip = 'aarch64-linux-gnu-strip' pkgconfig = '/usr/bin/pkg-config' [host_machine] system = 'linux' cpu_family = 'aarch64' cpu = 'aarch64' endian = 'little' [target_machine] system = 'linux' cpu_family = 'aarch64' cpu = 'armv8a' endian = 'little' [properties] platform = 'generic_aarch64' needs_exe_wrapper = false #sys_root = '/opt/FriendlyARM/toolchain/11.3-aarch64/aarch64-cortexa53-linux-gnu/sysroot' [built-in options] #c_args = [] #c_link_args = [] #cpp_args = [] #cpp_link_args = [] 配置
$ mkdir /tmp/build-rk3588 && cd /tmp/build-rk3588 $ meson setup --cross-file /work/github/xenomai4/libevl/rk3588-aarch64-linux-gnu.txt -Dbuildtype=release -Dprefix=/usr -Duapi=/work/github/rk3588/kernel-rockchip . /work/github/xenomai4/libevl /work/github/xenomai4/libevl:是libevl源码所在的位置
/work/github/xenomai4/kernel-rockchip:是内核源码所在位置
-Dprefix=/usr:安装到该目录下,不然后面要配置环境变量,比较麻烦
编译安装
# Build the whole thing $ meson compile # Eventually, install the result $ mkdir /tmp/rk3588-rootfs $ DESTDIR=/tmp/rk3588-rootfs ninja install 如果编译中出现错误evl-net.c:17:10: fatal error: bpf/bpf.h: No such file or directory和libbpf.so,这是交叉编译环境中没有没有内核bpf相关环境,修改libevl/utils/meson.build,将evl-net部分注释,不编译即可。
方式2 本地编译
在rk3588上编译
# 安装编译工具 $ sudo apt install meson $ pip3 install ninja --break-system-packages $ git clone https://source.denx.de/Xenomai/xenomai4/libevl.git # Prepare the build directory $ mkdir /tmp/build-native && cd /tmp/build-native $ meson setup -Dbuildtype=release -Dprefix=/usr -Duapi=~/kernel-rockchip . ~/libevl # Build it $ meson compile # Install the result $ ninja install ~/kernel-rockchip:为内核源码路径
如果要将libevl编译生成debian安装包,可以参考https://blog.devgenius.io/how-to-build-debian-packages-from-meson-ninja-d1c28b60e709
现在已经将libevl安装到`/usr/下
pi@NanoPi-R6S:~$tree /usr/ /usr/ |-- bin | |-- evl | |-- hectic | |-- latmus | |-- oob-net-icmp | |-- oob-net-udp | `-- oob-spi |-- include | `-- evl | |-- atomic.h | ... | |-- timer.h | `-- xbuf.h |-- lib | `-- aarch64-linux-gnu | |-- libevl.a | |-- libevl.so -> libevl.so.4 | |-- libevl.so.4 -> libevl.so.4.0.0 | |-- libevl.so.4.0.0 | `-- pkgconfig | `-- evl.pc `-- libexec `-- evl |-- evl-check |-- evl-gdb |-- evl-help |-- evl-net |-- evl-ps ... | `-- thread-mode-bits |-- trace.evl |-- trace.irq `-- trace.timer 3 测试
EVL 附带了一系列测试,运行这些测试来确保内核在目标系统上正常运行,测试evl参考官方说明。
单元测试
作为构建libevl的一部分,在$prefix/tests中生成了一系列单元测试程序。您应该运行它们中的每一个以确保一切正常。最简单的方法如下:
pi@NanoPi-R6S:/tmp/build-native$ sudo evl test basic-xbuf: OK clock-timer-periodic: OK clone-fork-exec: OK detach-self: OK duplicate-element: OK element-visibility: OK fault: OK fpu-preload: OK fpu-stress: OK heap-torture: OK mapfd: OK .... ring-spray: OK rwlock-read: OK rwlock-write: OK sched-quota-accuracy: 100.0% sched-tp-accuracy: OK sched-tp-overrun: OK sem-close-unblock: OK sem-flush: OK sem-timedwait: OK sem-wait: OK simple-clone: OK stax-lock: OK stax-warn: OK thread-mode-bits: OK
hectic:EVL 上下文切换
默认情况下, hectic程序会在用户空间和内核空间中运行大量 EVL 线程,以锻炼自治核心的调度程序。此外,该测试还可以特别强调浮点管理代码,以确保 FPU 在带外和带内线程上下文之间完美共享。
要运行此测试,需要在内核配置中启用
CONFIG_EVL_HECTIC。
pi@NanoPi-R6S:/tmp/build-native$ sudo hectic -s 200 == Testing FPU check routines... == FPU check routines: OK. == Threads: switcher_ufps0-0 rtk0-1 rtk0-2 rtup0-3 rtup0-4 rtup_ufpp0-5 rtup_ufpp0-6 rtus0-7 rtus0-8 rtus_ufps0-9 rtus_ufps0-10 rtuo0-11 rtuo0-12 rtuo_ufpp0-13 rtuo_ufpp0-14 rtuo_ufps0-15 rtuo_ufps0-16 rtuo_ufpp_ufps0-17 rtuo_ufpp_ufps0-18 fpu_stress_ufps0-19 switcher_ufps1-0 rtk1-1 rtk1-2 rtup1-3 rtup1-4 rtup_ufpp1-5 rtup_ufpp1-6 rtus1-7 rtus1-8 rtus_ufps1-9 rtus_ufps1-10 rtuo1-11 rtuo1-12 rtuo_ufpp1-13 rtuo_ufpp1-14 rtuo_ufps1-15 rtuo_ufps1-16 rtuo_ufpp_ufps1-17 rtuo_ufpp_ufps1-18 fpu_stress_ufps1-19 switcher_ufps2-0 rtk2-1 rtk2-2 rtup2-3 rtup2-4 rtup_ufpp2-5 rtup_ufpp2-6 rtus2-7 rtus2-8 rtus_ufps2-9 rtus_ufps2-10 rtuo2-11 rtuo2-12 rtuo_ufpp2-13 rtuo_ufpp2-14 rtuo_ufps2-15 rtuo_ufps2-16 rtuo_ufpp_ufps2-17 rtuo_ufpp_ufps2-18 fpu_stress_ufps2-19 switcher_ufps3-0 rtk3-1 rtk3-2 rtup3-3 rtup3-4 rtup_ufpp3-5 rtup_ufpp3-6 rtus3-7 rtus3-8 rtus_ufps3-9 rtus_ufps3-10 rtuo3-11 rtuo3-12 rtuo_ufpp3-13 rtuo_ufpp3-14 rtuo_ufps3-15 rtuo_ufps3-16 rtuo_ufpp_ufps3-17 rtuo_ufpp_ufps3-18 fpu_stress_ufps3-19 switcher_ufps4-0 rtk4-1 rtk4-2 rtup4-3 rtup4-4 rtup_ufpp4-5 rtup_ufpp4-6 rtus4-7 rtus4-8 rtus_ufps4-9 rtus_ufps4-10 rtuo4-11 rtuo4-12 rtuo_ufpp4-13 rtuo_ufpp4-14 rtuo_ufps4-15 rtuo_ufps4-16 rtuo_ufpp_ufps4-17 rtuo_ufpp_ufps4-18 fpu_stress_ufps4-19 switcher_ufps5-0 rtk5-1 rtk5-2 rtup5-3 rtup5-4 rtup_ufpp5-5 rtup_ufpp5-6 rtus5-7 rtus5-8 rtus_ufps5-9 rtus_ufps5-10 rtuo5-11 rtuo5-12 rtuo_ufpp5-13 rtuo_ufpp5-14 rtuo_ufps5-15 rtuo_ufps5-16 rtuo_ufpp_ufps5-17 rtuo_ufpp_ufps5-18 fpu_stress_ufps5-19 switcher_ufps6-0 rtk6-1 rtk6-2 rtup6-3 rtup6-4 rtup_ufpp6-5 rtup_ufpp6-6 rtus6-7 rtus6-8 rtus_ufps6-9 rtus_ufps6-10 rtuo6-11 rtuo6-12 rtuo_ufpp6-13 rtuo_ufpp6-14 rtuo_ufps6-15 rtuo_ufps6-16 rtuo_ufpp_ufps6-17 rtuo_ufpp_ufps6-18 fpu_stress_ufps6-19 switcher_ufps7-0 rtk7-1 rtk7-2 rtup7-3 rtup7-4 rtup_ufpp7-5 rtup_ufpp7-6 rtus7-7 rtus7-8 rtus_ufps7-9 rtus_ufps7-10 rtuo7-11 rtuo7-12 rtuo_ufpp7-13 rtuo_ufpp7-14 rtuo_ufps7-15 rtuo_ufps7-16 rtuo_ufpp_ufps7-17 rtuo_ufpp_ufps7-18 fpu_stress_ufps7-19 RTT| 00:00:01 RTH|---------cpu|ctx switches|-------total RTD| 4| 4672| 4672 RTD| 5| 4672| 4672 RTD| 1| 4501| 4501 RTD| 3| 4501| 4501 RTD| 0| 4501| 4501 RTD| 2| 4501| 4501 RTD| 6| 4729| 4729 RTD| 7| 4729| 4729 RTD| 4| 4674| 9346 RTD| 5| 4674| 9346 RTD| 7| 4676| 9405 RTD| 6| 4676| 9405 RTD| 0| 4503| 9004 RTD| 1| 4503| 9004 RTD| 3| 4503| 9004 RTD| 2| 4503| 9004 RTD| 4| 4674| 14020 RTD| 5| 4674| 14020 RTD| 7| 4674| 14079 RTD| 6| 4674| 14079 RTD| 2| 4448| 13452 RTT| 00:00:03 RTH|---------cpu|ctx switches|-------total RTD| 3| 4450| 13454 RTD| 0| 4560| 13564 RTD| 1| 4503| 13507 RTD| 5| 4678| 18698 RTD| 7| 4672| 18751 RTD| 4| 4731| 18751 RTD| 6| 4729| 18808 RTD| 2| 4501| 17953 RTD| 3| 4499| 17953 RTD| 0| 4560| 18124 RTD| 1| 4503| 18010 RTD| 5| 4727| 23425 RTD| 4| 4678| 23429 RTD| 7| 4731| 23482 RTD| 6| 4731| 23539 RTD| 2| 4503| 22456 RTD| 3| 4503| 22456 RTD| 0| 4560| 22684 RTD| 1| 4503| 22513 RTD| 5| 4674| 28099 RTD| 4| 4670| 28099 .... latmus:latency测试
如果您计划测量目标系统上最坏情况下的延迟,则应在此类系统上运行evl check命令,以便及早检测内核的任何明显错误配置,该检查需要内核配置中启用
CONFIG_IKCONFIG_PROC。
-
latmus -t校准gravitypi@NanoPi-R6S:/tmp/build-native$ sudo latmus -t == latmus started for core tuning, period=1000 microseconds (may take a while) irq gravity...500 ns kernel gravity...1000 ns user gravity...1500 ns == tuning completed after 21s -
-i --irq
从内核中断处理程序的上下文中收集延迟数据(测试irq响应时间)。
- -k --kernel
从基于内核的 EVL 线程的上下文中收集延迟数据或调整 EVL 核心计时器(测试evl内核线程响应时间)。
- -u --user
从用户空间中运行的 EVL 线程的上下文中收集延迟数据或调整 EVL 核心计时器。默认模式(测试evl用户线程响应时间)。
-
-s --sirq
测量从带外阶段发出合成中断的时刻与带内处理程序最终接收该中断之间的延迟。当在巨大的工作负载压力下测量时,这给出了带内内核由于本地中断禁用(即停止带内管道阶段)而经历的最坏情况中断延迟。因此,这与 EVL 应用从带外阶段观察到的更短且有限的中断延迟无关。
其他参数详见
--help输出和latmus参数说明
pi@NanoPi-R6S:/tmp/build-native$ sudo latmus --help usage: latmus [options]: -m --measure measure latency on timer event [default] -t --tune tune the EVL core timer -i --irq measure/tune interrupt latency -k --kernel measure/tune kernel scheduling latency -u --user measure/tune user scheduling latency [ if none of --irq, --kernel or --user is given, tune for all contexts ] -s --sirq measure in-band response time to synthetic irq -p --period=<us> sampling period -P --priority=<prio> responder thread priority [=90] -c --cpu=<n> pin responder thread to CPU [=current] -C --force-cpu=<n> similar to -c, accept non-isolated CPU -r --reset reset core timer gravity to factory default -b --background run in the background (daemon mode) -K --keep-going keep going on unexpected switch to in-band mode -A --max-abort=<us> abort if maximum latency exceeds threshold -T --timeout=<t>[dhms] stop measurement after <t> [d(ays)|h(ours)|m(inutes)|s(econds)] -v --verbose[=level] set verbosity level [=1] -q --quiet quiet mode (i.e. --verbose=0) -l --lines=<num> result lines per page, 0 = no pagination [=21] -H --histogram[=<nr>] set histogram size to <nr> cells [=200] -g --plot=<filename> dump histogram data to file (gnuplot format) -Z --oob-gpio=<host> measure EVL response time to GPIO event via <host> -z --inband-gpio=<host> measure in-band response time to GPIO event via <host> -I --gpio-in=<spec> input GPIO line configuration with <spec> = gpiochip-devname,pin-number[,rising-edge|falling-edge] -O --gpio-out=<spec> output GPIO line configuration with <spec> = gpiochip-devname,pin-number pi@NanoPi-R6S:/tmp/build-native$ sudo latmus warming up on CPU4... RTT| 00:00:01 (user, 1000 us period, priority 98, CPU4) RTH|----lat min|----lat avg|----lat max|-overrun|---msw|---lat best|--lat worst RTD| 0.531| 1.041| 1.403| 0| 0| 0.531| 1.403 RTD| 0.528| 1.027| 2.871| 0| 0| 0.528| 2.871 RTD| 0.528| 1.013| 1.431| 0| 0| 0.528| 2.871 RTD| 0.531| 1.003| 1.402| 0| 0| 0.528| 2.871 RTD| 0.530| 0.997| 1.403| 0| 0| 0.528| 2.871 .... 4 RK3588 xenomai4实时性能
这里还是老方式,内存和cpu压力使用stress -m 16 -c 16来产生。
图形压力启用4个终端运行glmark2-es2-wayland产生。
while true; do glmark2-es2-wayland; done
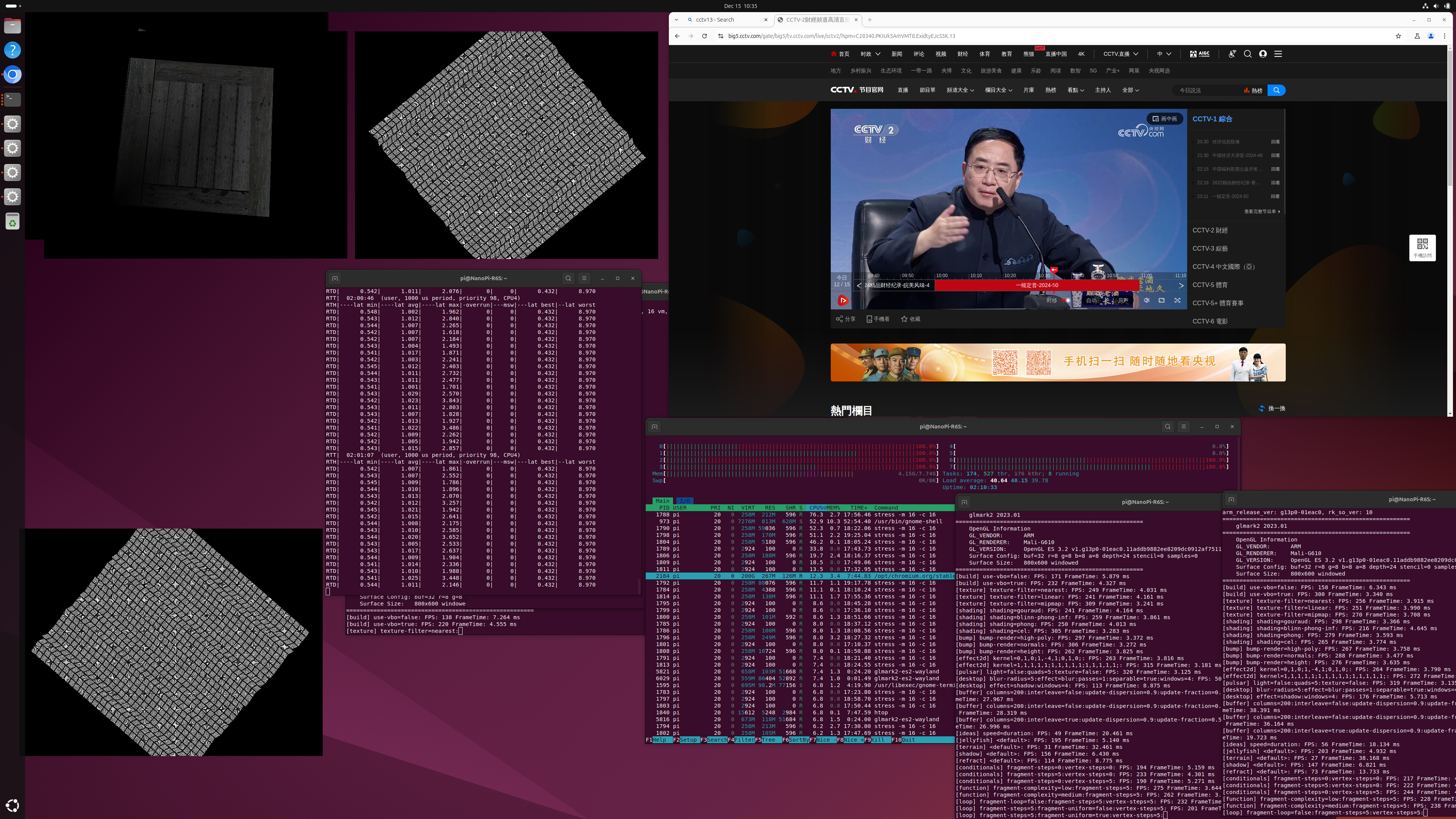
测试后结果如下:
pi@NanoPi-R6S:/tmp/build-native$ sudo latmus -t pi@NanoPi-R6S:/tmp/build-native$ sudo latmus --plot=evl-latency.txt pi@NanoPi-R6S:/tmp/build-native$cat evl-latency.txt # test started on: Sun Dec 15 08:34:03 2024 # Linux version 6.1.57-evl (wsg1100@wsg1100-virtual-machine) (aarch64-linux-gnu-gcc (ctng-1.25.0-119g-FA) 11.3.0, GNU ld (GNU Binutils) 2.38) #2 SMP EVL Sun Dec 15 10:22:29 CST 2024 # libevl version: evl.0.50 -- #c39165f (2024-09-25 09:25:01 +0200) # sampling period: 1000 microseconds # clock gravity: 500i 1000k 1500u # clocksource: arch_sys_counter # vDSO access: architected # context: user # thread priority: 98 # thread affinity: CPU4 # duration (hhmmss): 02:01:50 # peak (hhmmss): 01:52:07 # min latency: 0.432 # avg latency: 1.012 # max latency: 8.970 # sample count: 7309414 0 3560945 1 3741581 2 5998 3 745 4 99 5 33 6 9 7 3 8 1 由于时间关系,仅跑了2小时(主要是怕板子没散热挂了,实在太烫了),这latency分布,不得不说,相比xenomai3稳得一批。
5 总结
通过对xenomai4初步测试,从latency数据上看,比xenomai3好一些,波动不频繁,虽然xenomai3已经很好了(满载2周 了latency≤15us)。
目前,Xenomai 4面临的主要问题是其编程API接口与Xenomai 3不兼容,同时尚未支持POSIX接口。若能实现POSIX接口的支持,将有助于构建更为完善的生态系统,并简化从Xenomai 3到Xenomai 4的迁移过程。所以,Xenomai 4目前的受众群体相对较小。
xenomai4与xenomai3工作原理一致,除API接口不同外其他注意事项基本一致。笔者目前还广泛使用xenomai4,若后续实际项目上用到了,再更新一些关于xenomai4的相关文章,敬请关注!





