
0、引言
我们知道,这当代操作系统中,多线程和多进程模型被广泛的使用以提高系统的并发效率。随着互联网不断的发展,面对如今的高并发场景,为每个任务都创建一个线程是不现实的,使用线程则需要系统不断的在用户态和内核态之间不断的切换,引起不必要的损耗,于是引入了协程。协程存在于用户空间,是一种轻量级的并发执行单元,其创建和上下文的开销更小,如何管理数量众多的协程是一个重要的话题。此篇笔记用于分享笔者学习Go语言协程调度的GMP模型的理解,以及源码的实现。当前使用的Go语言版本为1.22.4。
本篇笔记参考了以下文章:
[Golang三关-典藏版] Golang 调度器 GMP 原理与调度全分析 | Go 技术论坛
1、GMP模型拆解
Goroutine调度器的工作是将准备运行的goroutine分配到工作线程上,涉及到的主要概念如下:
1.1、G
G代表的是Goroutine,是Go语言对协程概念的抽象,其有以下的特点:
- 是一个轻量级的线程
- 拥有自己的栈、状态、以及执行的任务函数
- 每一个G会被分配到一个可用的P,并且在M上运行
其结构定义位于runtime/runtime2.go中:
type g struct { // ... m *m // ... sched gobuf // ... } type gobuf struct { sp uintptr pc uintptr ret uintptr bp uintptr // for framepointer-enabled architectures } 在这里,我们核心关注其内嵌了一个m和一个gobuf类型的sched。gobuf主要用于Gorutine的上下文切换,其保存了G执行过程中的CPU寄存器的状态,使得G在暂停、调度和恢复运行时能够正确地恢复上下文。
G主要有以下几种状态:
const ( _Gidle = iota // 0 _Grunnable // 1 _Grunning // 2 _Gsyscall // 3 _Gwaiting // 4 //... _Gdead // 6 //... _Gcopystack // 8 _Gpreempted // 9 //... ) -
Gidle:表示这个G刚刚被分配,尚未初始化。 -
Grunnable:表示这个G在运行队列中,它当前不再执行用户代码,栈未被占用。 -
Grunning:表示这个G可能在执行用户代码,栈被这个G占用,它不在运行队列中,并且它被分配给了一个M和一个P(g.m和g.m.p是有效的)。 -
Gsyscall:表示这个G正在执行系统调用,它不在执行用户代码,栈被这个G占用。它不在运行队列中,并且它被分配给了一个M。 -
Gwaiting:表示这G被堵塞在运行时,它没有执行用户代码,也不在运行队列中,但是它应该被记录在某个地方,以便在必要时将其唤醒。(ready())gc、channel 通信或者锁操作时经常会进入这种状态。 -
Gdead:表示这个G当前未使用,它可能是刚被初始化,也可能是已经被销毁。 -
Gcopystack:表示这个G的栈正在被移动。 -
Gpreempted:表示这个G因抢占而被挂起,且该G自行停止,等待进一步的恢复。它类似于Gwaiting,但是Gpreempted还没有一个负责将其状态恢复的管理者,只有某个suspendG操作将该G的状态从Gpreempted转换为Gwaiting,这样调度器才会接管这个G。
在阅读有关调度逻辑的源码的时候,我们可以通过搜索casgstatus方法去定位到使得G状态改变的函数,例如:casgstatus(gp, _Grunning, _Gsyscall)表示将该G的状态从Grunning变换到Gsyscall,就可以找到对应的函数学习了。


1.2、M
M是Machine,也是Worker Thread,代表的是操作系统的线程。Go运行时在需要时创建或者销毁M,将G安排到M上执行,充分利用多核CPU的能力。其具有以下的特点:
- M是Go与操作系统之间的桥梁,它负责执行分配给它的G。
- M的数量会根据系统资源进行调整。
- M可能会被特定的G通过
LockOSThread锁定,这种G和M的绑定确保了特定Goroutine可以持续使用同一个线程。
结构定义如下:
type m struct{ g0 *g // goroutine with scheduling stack curg *g // current running goroutine tls [tlsSlots]uintptr // thread-local storage (for x86 extern register) p puintptr // attached p for executing go code (nil if not executing go code) oldp puintptr // the p that was attached before executing a syscall //... } 每一个M结构体都会有一个名为g0的G,它是一个特殊的Goroutine,它并不复杂执行用户的代码,而是负责调度G。g0会分配G绑定到M中执行。tls表示的是“Local Thread Storage”,其存储了与当前线程相关的特定信息,而tls数组的第一个槽位通常用于存储g0的栈指针。
M存在一个状态,名为“自旋态”,处在自旋态的M会不断的往全局队列中寻找可运行的G去执行,并且解除自旋态。
1.3、P
P是Processor,代表逻辑处理器,是Goroutine调度的虚拟概念。每个P负责分配执行Goroutine的资源,其具有以下的特点:
- P是G的执行上下文,它具有一个本地队列存储着G,以及对应的任务调度机制,负责在M上执行一个具体的G。
- P的数量由环境变量
GOMAXPROCS决定,如果其数量大于CPU的物理线程数量时就没有更多的意义了。 - P是去执行Go代码所必备的资源,M必须绑定了一个P才能去执行Go代码。但是M可以在没有绑定P的情况下执行系统调用或者被阻塞。
type p struct { status uint32 runqhead uint32 runqtail uint32 runq [256]guintptr m muintptr runnext guintptr //... } - runq存储了这个P具有的goroutine队列,最大长度为256
- runqhead和runqtail分别指向队列的头部和尾部
- runnext存储了下一个可执行的goroutine
P也含有几个状态,如下:
const ( _Pidle = iota _Prunning _Psyscall _Pgcstop _Pdead ) - Pidle:表示P没有被运行用户代码或者调度器,通常这个P在空闲P列表中,供调度器使用,但它也可能在其他状态之间转换。P由空闲队列
idle list或者其他转换其状态的对象拥有,它的runq是空的。 - Prunning:表示P被M拥有,并且正在运行用户代码或者调度器。只有拥有此P的M被允许更改P的状态,M可以将P转换为Pidle(当没有工作的时候)、Psyscall(当进入一个系统调用时)、Pgcstop(安顿垃圾回收时)。M还可以将P的所有权交接给另一个M(例如调度一个locked的G)
- Psyscall:表示P没有在运行用户代码,与在系统调用中的M相关但不被其拥有。处于Psyscall状态的P可能会被其他M抢走。将P转换给另一个M是轻量级的,并且P会保持和原始的M的关联性。
- Pgcstop:表示P被暂停以进行STW(Stop The World)(执行垃圾回收)。
- Pdead:表示P不再被使用(GOMAXPROCS减少)。死去的P将会被剥夺资源,但是任然会保留少量的资源例如Trace Buffer,用于后续的跟踪分析需求。
1.4、Schedt
schedt是全局goroutine队列的封装
type schedt struct { // ... lock mutex // ... runq gQueue runqsize int32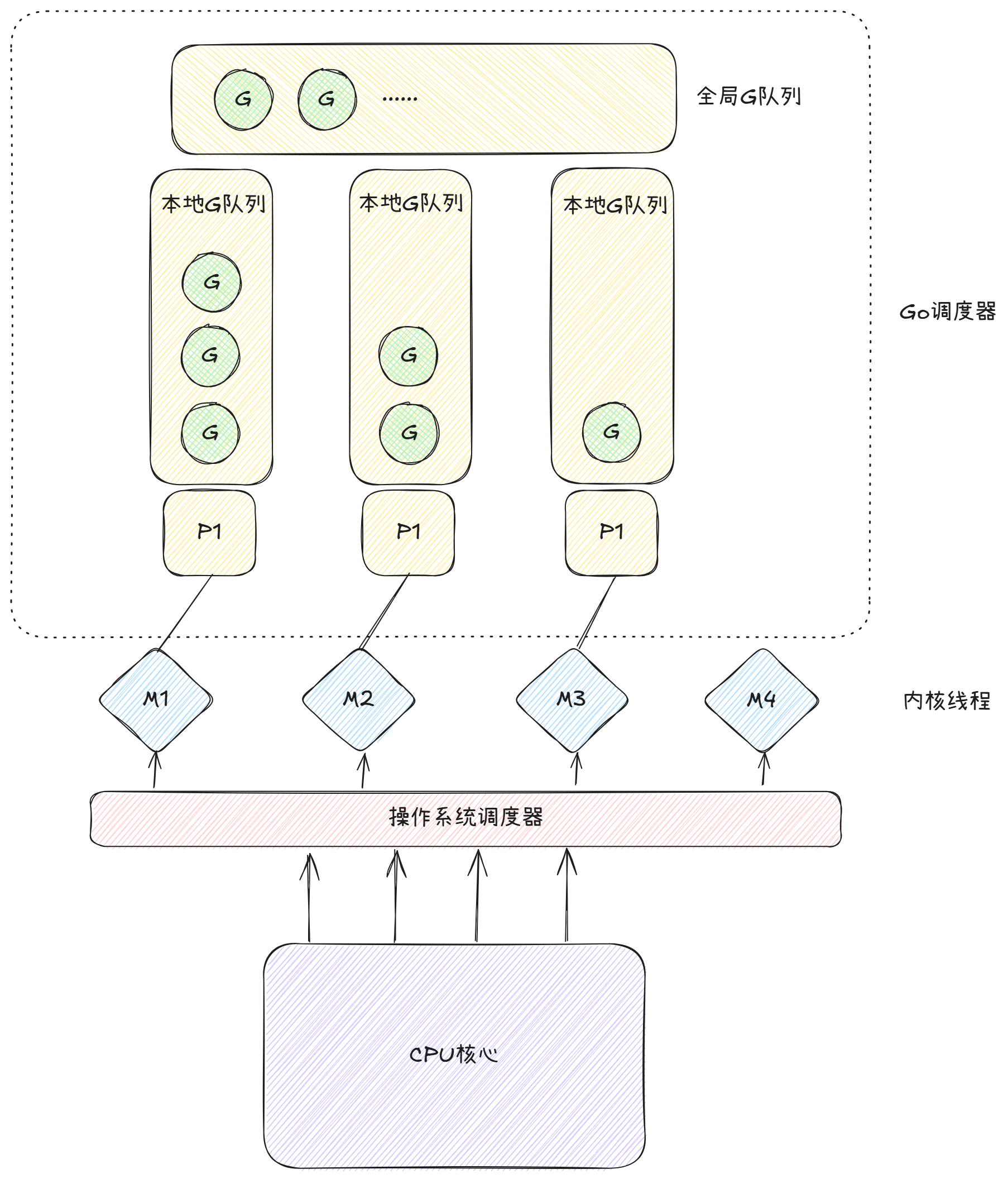 // ... } - lock:是操作全局队列的锁
- runq:存储G的队列
- runqsize:全局G队列的容量
2、调度模型的工作流程
我们可以用下图来整体的表示该调度模型的流程:
在接下来的部分,我们将主要探讨GMP调度模型是怎么完成一轮调度的,即是如何完成g0到g再到g0的切换的,期间大致发生了什么。
2.1、G的状态转换
我们刚刚提及到,每一个M都有一个名为g0的Goroutine,去负责调度普通的g绑定到M上执行。g0和普通的g之间存在一个转换,当执行普通的g上的代码的时候,就会将执行权交给g,当g执行完代码或者因为原因需要被挂起、退出执行等,就会重新将执行权交给g0。
g0和P是一个协作的关系,P的队列决定了哪些goroutine可以在绑定P时被调用,而g0是执行调度逻辑的关键的goroutine,负责在必要时释放P的资源。
当g0需要将执行权交给g时,会调用一个名为gogo的方法,传入g的栈指针,去执行用户的代码。
func gogo(buf *gobuf) 当需要重新将执行权转交给g0时,都会执行一个名为mcall的方法。
func mcall(fn func(*g)) mcall在go需要进行协程调换时被调用,它传入一个回调函数fn,里面携带了当前正在运行的g的指针,它主要做了以下三点的工作:
- 保存当前g的信息,即将PC/SP的信息存储到g->sched中,保证后续可以恢复g的执行现场。
- 将当前M的堆栈从g切换到g0
- 在g0的栈上执行新的函数fn,通常在fn中会进一步安排g的去向,并且调用
schedule函数,让当前M去寻找另一个可以执行的G。

2.2、调度类型
我们现在知道了,g和g0是通过什么函数进行状态切换的。接下来我们就要来探讨,它们是什么情况下要进行切换,即调度策略有什么。
GMP调度模型一共有4种调度策略,分别为:主动调度、被动调度、正常调度、抢占调度。

- 主动调度:提供给用户的方法,当用户调用了runtime.Gosched()方法时,此时当前的g会让出执行权,将g安排进任务队列等待下一次被调度。
- 被动调度:当因不满足某种执行条件,通常为channel读写条件不满足时,会执行gopark()函数,此时的g将会被置为等待状态。
- 正常调度:g正常的执行完毕,转接执行权。
- 抢占调度:存在一个全局监控者moniter,它会每隔一段时间周期去检查是否有G运行太长时间,若发现了,将会通知P去进行和M的解绑,让出P。这里需要全局监控者的存在是因为当G进入到系统调用的时候,这个线程M会陷入僵持,无法主动去检查,需要外援辅助。
2.3、宏观调度流程
接下来我们来关注整体一轮的调度流程,对于g0和g的一轮调度,可以用下图来表示。

schedule作为每一轮调度的开始,它会寻找到可以执行的G,然后调用execute将该g绑定到一个线程M上,然后执行gogo方法去真正的运行一个goroutine。当需要转换时,goroutine会在底层执行mcall方法,保存栈信息,然后执行回调函数fn,即绿框内的方法之一,将执行权重新交给g0。
2.3.1、schedule()
schedule()方法定位于runtime/proc中,忽略非主流程部分,源码内容如下:
//找到一个是就绪态的G去运行 func schedule() { mp := getg().m //... top: pp := mp.p.ptr() pp.preempt = false //如果该M在自旋,但是队列含有G,那么抛出异常。 if mp.spinning && (pp.runnext != 0 || pp.runqhead != pp.runqtail) { throw("schedule: spinning with local work") } gp, inheritTime, tryWakeP := findRunnable() //阻塞的寻找G //... //当前M将要运转一个G,解除自旋状态 if mp.spinning { resetspinning() } //... execute(gp, inheritTime) } 该方法主要是寻找一个可以运行的G,交给该线程去运行。我们在一开始提到,线程会存在一种名为“自旋态”的状态,它会不断的自旋去寻找可以执行的G来执行,成功找到了就解除了自旋态。
这里存在一个点我们值得去注意,处在自旋态的线程它不是在空占用计算资源吗?那么不就是降低了系统的性能吗?
其实这是一个中和的策略,假如每次当出现了一个新的Goroutine需要去执行的时候,我们才创建一个线程M去执行它,然后执行完了又删除掉不去复用,那么就会带来大量的创建销毁的资源消耗。我们希望当有一个新的Goroutine来的时候,能立即有一个M去执行它,就可以将空闲暂时无任务处理的M去自己寻找Goroutine,减少了创建销毁的资源消耗。但是我们也不能有太多的处于自旋态的线程,不然就造就另一个过多消耗的地方了。
我们先跟进一下resetspinning(),看看其执行的策略是什么。
1、resetspinning()
func resetspinning() { gp := getg() //... gp.m.spinning = false nmspinning := sched.nmspinning.Add(-1) //... wakep() } //尝试添加一个P去执行G。该方法被调用当一个G状态为runnable时。 func wakep() { //如果自旋的M数量不为0则返回 if sched.nmspinning.Load() != 0 || !sched.nmspinning.CompareAndSwap(0, 1) { return } // 禁用抢占,直到 pp 的所有权转移到 startm 中的下一个 M,否则在这里的抢占将导致 pp 被卡在等待进入 _Pgcstop 状态。 mp := acquirem() var pp *p lock(&sched.lock) //尝试从空闲P队列获取一个P pp, _ = pidlegetSpinning(0) if pp == nil { if sched.nmspinning.Add(-1) < 0 { throw("wakep: negative nmspinning") } unlock(&sched.lock) releasem(mp) return } unlock(&sched.lock) startm(pp, true, false) releasem(mp) } 在resetspinning中,我们先将当前M解除了自旋态,然后尝试去唤醒一个P,即进入到wakep()方法中。
if sched.nmspinning.Load() != 0 || !sched.nmspinning.CompareAndSwap(0, 1) { return } 在wakep方法内,我们先检查了当前处在自旋的M的数量,假如>0,则不再去唤醒一个新的P,这是为了防止同一时间内过多的自旋的M空运转消耗CPU资源。
pp, _ = pidlegetSpinning(0) if pp == nil { if sched.nmspinning.Add(-1) < 0 { throw("wakep: negative nmspinning") } unlock(&sched.lock) releasem(mp) return } 接着会尝试从空闲P队列中获取一个P,如果没有空闲的P,那么此时会减少自旋线程的数量(这里只是减少了数量,但是具体这个处在自旋的线程接下来去做什么了我也没有明白)并且返回。
startm(pp, true, false) 假如获取了一个空闲的P,会为这一个P分配一个线程M。

2、findRunnable()
findRunnable是一轮调度流程中最核心的方法,它用于找到一个可执行的G。
func findRunnable() (gp *g, inheritTime, tryWakeP bool) { mp := getg().m top: pp := mp.p.ptr() //... //每61次调度周期就检查一次全局G队列,防止在特定情况只依赖于本地队列。 if pp.schedtick%61 == 0 && sched.runqsize > 0 { lock(&sched.lock) gp := globrunqget(pp, 1) unlock(&sched.lock) if gp != nil { return gp, false, false } } //... // local runq if gp, inheritTime := runqget(pp); gp != nil { return gp, inheritTime, false } // global runq if sched.runqsize != 0 { lock(&sched.lock) gp := globrunqget(pp, 0) unlock(&sched.lock) if gp != nil { return gp, false, false } } //在正式的去偷取G之前,用非阻塞的方式检查是否有就绪的网络协程,这是对netpoll的一个优化。 if netpollinited() && netpollAnyWaiters() && sched.lastpoll.Load() != 0 { if list, delta := netpoll(0); !list.empty() { // non-blocking gp := list.pop() injectglist(&list) netpollAdjustWaiters(delta) trace := traceAcquire() casgstatus(gp, _Gwaiting, _Grunnable) if trace.ok() { trace.GoUnpark(gp, 0) traceRelease(trace) } return gp, false, false } } //如果当前的M出于自旋状态,或者说处于自旋状态的M的数量小于活跃的P数量的一半时,则进行G窃取。(防止当系统的并行度较低时,自旋的M过多占用CPU资源) if mp.spinning || 2*sched.nmspinning.Load() < gomaxprocs-sched.npidle.Load() { if !mp.spinning { mp.becomeSpinning() } gp, inheritTime, tnow, w, newWork := stealWork(now) if gp != nil { // Successfully stole. return gp, inheritTime, false } if newWork { // There may be new timer or GC work; restart to // discover. goto top } now = tnow if w != 0 && (pollUntil == 0 || w < pollUntil) { // Earlier timer to wait for. pollUntil = w } } //... 其主要的执行步骤如下:
(一)第六十一次调度
if pp.schedtick%61 == 0 && sched.runqsize > 0 { lock(&sched.lock) gp := globrunqget(pp, 1) unlock(&sched.lock) if gp != nil { return gp, false, false } } 首先检查P的调度次数,假如这次是P的第61此次调度,并且全局的G队列长度>0,就会从全局队列获取一个G。这是为了防止在特定情况下,只运行本地队列的G,忽视了全局队列。
其内部调用的globrunqget方法主流程如下:
//尝试从G的全局队列获取一批G func globrunqget(pp *p, max int32) *g { assertLockHeld(&sched.lock) //检查全局队列是否为空 if sched.runqsize == 0 { return nil } //计算需要获取的G的数量 n := sched.runqsize/gomaxprocs + 1 if n > sched.runqsize { n = sched.runqsize } if max > 0 && n > max { n = max } //确保从队列中获取的G数量不超过当前本地队列的G数量的一半,避免全局队列所有的G都转移到本地队列中导致负载不均衡 if n > int32(len(pp.runq))/2 { n = int32(len(pp.runq)) / 2 } sched.runqsize -= n gp := sched.runq.pop() n-- for ; n > 0; n-- { gp1 := sched.runq.pop() runqput(pp, gp1, false) } return gp } //计算需要获取的G的数量 n := sched.runqsize/gomaxprocs + 1 if n > sched.runqsize { n = sched.runqsize } if max > 0 && n > max { n = max } if n > int32(len(pp.runq))/2 { n = int32(len(pp.runq)) / 2 } n为要从全局G队列获取的G的数量,可以看到它会至少获取一个G,至多获取runqsize/gomaxprocs+1个G,它保证了一个P不过多的获取G从而影响负载均衡。并且不允许n一次获取全局G队列一半以上的G,保证负载均衡。
gp := sched.runq.pop() n-- for ; n > 0; n-- { gp1 := sched.runq.pop() runqput(pp, gp1, false) } 决定好获取多少个G后,第一个G会直接通过指针返回,剩余的则是将其添加到P的本地队列中。
在当前(一)的调用中,函数设置了max值为1,因此只会从全局队列获取1个G返回。
虽然在(一)中不会执行runqput,但是我们还是来看看是怎么将G添加到P的本地队列的。
// runqput尝试将G放到本地队列中 //如果next是False,runqput会将G添加到本地队列的尾部 //如果是True,runqput会将G添加到下一个将被调度的G的槽位 //如果运行队列满了,那么将会把g放回全局队列 func runqput(pp *p, gp *g, next bool) { // if randomizeScheduler && next && randn(2) == 0 { next = false } if next { retryNext: oldnext := pp.runnext if !pp.runnext.cas(oldnext, guintptr(unsafe.Pointer(gp))) { goto retryNext } if oldnext == 0 { return } // Kick the old runnext out to the regular run queue. gp = oldnext.ptr() } retry: h := atomic.LoadAcq(&pp.runqhead) //加载队列头的位置 t := pp.runqtail if t-h < uint32(len(pp.runq)) { //检查本地队列是否已满 pp.runq[t%uint32(len(pp.runq))].set(gp) //未满将gp插入runqtail的指定位置 atomic.StoreRel(&pp.runqtail, t+1) //更新runtail,表示插入的G可供消费 return } if runqputslow(pp, gp, h, t) { //如果本地队列已满,则尝试放回全局队列 return } // the queue is not full, now the put above must succeed goto retry } if randomizeScheduler && next && randn(2) == 0 { next = false } 在第一步中,我们看到即使next被设置为true,即要求了该G应该被放置在本地P队列的runnext槽位中,也会有概率地将next置为false。
if next { retryNext: oldnext := pp.runnext if !pp.runnext.cas(oldnext, guintptr(unsafe.Pointer(gp))) { goto retryNext } if oldnext == 0 { return } // Kick the old runnext out to the regular run queue. gp = oldnext.ptr() } 假如next仍为true,此时先获取原本P调度器中,runnext槽位的G(oldnext),然后会不断地尝试将新的G替换掉旧的G直到成功为止。当成功之后,在下面的操作流程中会把旧的G放入到P的本地队列中。
retry: h := atomic.LoadAcq(&pp.runqhead) //加载队列头的位置 t := pp.runqtail if t-h < uint32(len(pp.runq)) { //检查本地队列是否已满 pp.runq[t%uint32(len(pp.runq))].set(gp) //未满将gp插入runqtail的指定位置 atomic.StoreRel(&pp.runqtail, t+1) //更新runtail,表示插入的G可供消费 return } if runqputslow(pp, gp, h, t) { //如果本地队列已满,则尝试放回全局队列 return } // the queue is not full, now the put above must succeed goto retry } 在将G加入进P的本地队列的流程中,需要获取队列头部和尾部的坐标,用来判断本地队列是否已满,未满则将G插入进本地队列的尾部中。否则执行runqputslow方法,尝试放回全局队列。
接下来继续跟进runqputslow方法的执行流程。
//将G和一批工作(本地队列的G)放入到全局队列 func runqputslow(pp *p, gp *g, h, t uint32) bool { var batch [len(pp.runq)/2 + 1]*g //本地队列一半的G // First, grab a batch from local queue. n := t - h n = n / 2 if n != uint32(len(pp.runq)/2) { throw("runqputslow: queue is not full") } for i := uint32(0); i < n; i++ { batch[i] = pp.runq[(h+i)%uint32(len(pp.runq))].ptr() } if !atomic.CasRel(&pp.runqhead, h, h+n) { // cas-release, commits consume return false } batch[n] = gp if randomizeScheduler { //打乱顺序 for i := uint32(1); i <= n; i++ { j := cheaprandn(i + 1) batch[i], batch[j] = batch[j], batch[i] } } // Link the goroutines. for i := uint32(0); i < n; i++ { batch[i].schedlink.set(batch[i+1]) } var q gQueue q.head.set(batch[0]) q.tail.set(batch[n]) // Now put the batch on global queue. lock(&sched.lock) globrunqputbatch(&q, int32(n+1)) unlock(&sched.lock) return true } 其执行流程如下:
var batch [len(pp.runq)/2 + 1]*g //本地队列一半的G 首先创建一个batch数组,是容量为P的本地队列当前含有的G的数量的一半,用于存储将转移的G。
n := t - h n = n / 2 if n != uint32(len(pp.runq)/2) { throw("runqputslow: queue is not full") } for i := uint32(0); i < n; i++ { batch[i] = pp.runq[(h+i)%uint32(len(pp.runq))].ptr() } 接着,开始将本地队列一半的G的指针,存储在batch中。
if randomizeScheduler { //打乱顺序 for i := uint32(1); i <= n; i++ { j := cheaprandn(i + 1) batch[i], batch[j] = batch[j], batch[i] } } 然后会打乱batch中的顺序,保证随机性。
// Link the goroutines. for i := uint32(0); i < n; i++ { batch[i].schedlink.set(batch[i+1]) } var q gQueue q.head.set(batch[0]) q.tail.set(batch[n]) // Now put the batch on global queue. lock(&sched.lock) globrunqputbatch(&q, int32(n+1)) unlock(&sched.lock) return true 最后一部是将batch中的各个G用指针连接起来,转换为链表的形式,并且链接在全局队列中。
runqput连接的流程较长,用下图来概括:

(二)本地队列获取
// local runq if gp, inheritTime := runqget(pp); gp != nil { return gp, inheritTime, false } 假如不是第61次调用,findrunnable会尝试从本地队列中获取一个G用于调度。我们来看runqget方法的执行。
// 从本地可运行队列中获取 g。 func runqget(pp *p) (gp *g, inheritTime bool) { // 如果有 runnext,则它是下一个要运行的 G。 next := pp.runnext // 如果 runnext 非零且 CAS 操作失败,它只能被另一个 P 窃取,因为其他 P 可以竞争将 runnext 设置为零,但只有当前 P 可以将其设置为非零。 // 因此,如果 CAS 失败,则无需重试该操作。 if next != 0 && pp.runnext.cas(next, 0) { return next.ptr(), true } for { h := atomic.LoadAcq(&pp.runqhead) // load-acquire, synchronize with other consumers t := pp.runqtail if t == h { return nil, false } gp := pp.runq[h%uint32(len(pp.runq))].ptr() if atomic.CasRel(&pp.runqhead, h, h+1) { // cas-release, commits consume return gp, false } } } 假如可以获取到P的runnext,则返回这一个G,否则就获取本地队列的头部的G。
(三)全局队列获取
// global runq if sched.runqsize != 0 { lock(&sched.lock) gp := globrunqget(pp, 0) unlock(&sched.lock) if gp != nil { return gp, false, false } } 假如无法从本地队列获取到G,则说明了P的本地队列为空,此时会尝试从全局队列获取G。调用了globrunqget方法从全局队列获取G,注意此时因为设置了max为0表示不生效,该方法可能会从全局队列中获取多个G放到P的本地队列内。关于该方法的具体代码已经在(一)中讲解。
(四)网络事件获取
//在正式的去偷取G之前,用非阻塞的方式检查是否有就绪的网络协程,这是对netpoll的一个优化。 if netpollinited() && netpollAnyWaiters() && sched.lastpoll.Load() != 0 { if list, delta := netpoll(0); !list.empty() { // non-blocking gp := list.pop() injectglist(&list) netpollAdjustWaiters(delta) trace := traceAcquire() casgstatus(gp, _Gwaiting, _Grunnable) if trace.ok() { trace.GoUnpark(gp, 0) traceRelease(trace) } return gp, false, false } } 假如本地队列和全局队列都没有G可以获取,此时我们将进入GMP调度模型的一个特殊机制:WorkStealing,即从其他的P调度器中偷取其本地队列的G到自己的本地队列中,这是GMP调度模型独有的机制,可以更加充分地利用线程提高系统整体效率。
在此之前,会先尝试用非阻塞的方式获取准备就绪的网络协程,如果有则先执行网络协程。
为什么在携程的调度中,还要专门引入对网络协程事件的检测?这一部分不应该解耦吗?
这是我自己的一个思考,我认为这应该是Go的运行时的设计原则的一个方面体现。runtime的主要任务是负责
协程调度和资源管理,但是在实际应用中,网络事件的处理通常会和协程调度紧密关联。Go使用非阻塞网络轮询机制(netpoll)允许在有网络事件发生时能快速的唤醒和调度相应的协程去处理,在进行了一次本地队列和全局队列的检查后,进行一次网络协程的检查能保证对网络I/O的快速响应。
(五)工作窃取
if mp.spinning || 2*sched.nmspinning.Load() < gomaxprocs-sched.npidle.Load() { if !mp.spinning { mp.becomeSpinning() } gp, inheritTime, tnow, w, newWork := stealWork(now) if gp != nil { // Successfully stole. return gp, inheritTime, false } //... } 当本地队列和全局队列都没有G时,此时会进行工作窃取机制,尝试从其他调度器P中窃取G。
if mp.spinning || 2*sched.nmspinning.Load() < gomaxprocs-sched.npidle.Load() { if !mp.spinning { mp.becomeSpinning() } 如果当前的自旋的M的数量<空闲的P的数量的一半,就会将当前M设置为自旋态。
gp, inheritTime, tnow, w, newWork := stealWork(now) if gp != nil { // Successfully stole. return gp, inheritTime, false } 调用stealWork进行窃取。
func stealWork(now int64) (gp *g, inheritTime bool, rnow, pollUntil int64, newWork bool) { pp := getg().m.p.ptr() ranTimer := false //最多从其他P窃取4次任务 const stealTries = 4 for i := 0; i < stealTries; i++ { //在进行最后一次的遍历前,优先检查其他P的Timer队列 stealTimersOrRunNextG := i == stealTries-1 //随机生成遍历起点 for enum := stealOrder.start(cheaprand()); !enum.done(); enum.next() { //... p2 := allp[enum.position()] if pp == p2 { continue } //... //如果P是非空闲的,则尝试窃取 if !idlepMask.read(enum.position()) { if gp := runqsteal(pp, p2, stealTimersOrRunNextG); gp != nil { return gp, false, now, pollUntil, ranTimer } } } } //如果在所有尝试中均未找到可运行的 Goroutine 或 Timer,则返回 nil,并返回 pollUntil(下一次轮询的时间)。 return nil, false, now, pollUntil, ranTimer } const stealTries = 4 for i := 0; i < stealTries; i++ { 当前P会尝试从其他的P的本地队列中进行窃取,最多会进行4次。
for enum := stealOrder.start(cheaprand()); !enum.done(); enum.next() { //... p2 := allp[enum.position()] if pp == p2 { continue } //... //如果P是非空闲的,则尝试窃取 if !idlepMask.read(enum.position()) { if gp := runqsteal(pp, p2, stealTimersOrRunNextG); gp != nil { return gp, false, now, pollUntil, ranTimer } } } 使用runqsteal方法进行窃取。
//从p2偷去一半的工作到p中 func runqsteal(pp, p2 *p, stealRunNextG bool) *g { t := pp.runqtail n := runqgrab(p2, &pp.runq, t, stealRunNextG) if n == 0 { return nil } n-- gp := pp.runq[(t+n)%uint32(len(pp.runq))].ptr() if n == 0 { return gp } h := atomic.LoadAcq(&pp.runqhead) // load-acquire, synchronize with consumers if t-h+n >= uint32(len(pp.runq)) { throw("runqsteal: runq overflow") } atomic.StoreRel(&pp.runqtail, t+n) // store-release, makes the item available for consumption return gp } runqsteal方法会将p2的本地队列中偷取其一半的G放到p的本地队列中,我们进而跟进runqgrab方法;
func runqgrab(pp *p, batch *[256]guintptr, batchHead uint32, stealRunNextG bool) uint32 { for { h := atomic.LoadAcq(&pp.runqhead) // load-acquire, synchronize with other consumers t := atomic.LoadAcq(&pp.runqtail) // load-acquire, synchronize with the producer n := t - h n = n - n/2 if n == 0 { if stealRunNextG { //尝试偷取P的下一个将要调度的G if next := pp.runnext; next != 0 { //如果P正在运行,为了避免产生频繁的任务状态“抖动”,互相抢占任务导致的调度竞争,所以休眠一会,等待P调度完成再尝试获取。 if pp.status == _Prunning { if !osHasLowResTimer { usleep(3) } else { osyield() } } //尝试窃取任务 if !pp.runnext.cas(next, 0) { continue } //窃取成功 batch[batchHead%uint32(len(batch))] = next return 1 } } return 0 } //如果n超过队列一半,则由于并发访问导致h和t不一致,要重新开始。 if n > uint32(len(pp.runq)/2) { // read inconsistent h and t continue } //从runq批量抓取任务 for i := uint32(0); i < n; i++ { g := pp.runq[(h+i)%uint32(len(pp.runq))] batch[(batchHead+i)%uint32(len(batch))] = g } if atomic.CasRel(&pp.runqhead, h, h+n) { // cas-release, commits consume return n } } } 从n=n-n/2我们可以得知,是获取一半数量的G。
通过stealWork->runqsteal->runqgrab的方法链路,完成了将其他P的本地队列G搬运到当前P的本地队列中的过程。
(六)总览
最后,我们用绘图来整体回顾findRunnable的执行流程。

2.3.2、execute()
当我们成功的通过findRunnable()找到了可以被执行的G的时候,就会对当前的G调用execute()方法,开始去调用这个G。
func execute(gp *g, inheritTime bool) { mp := getg().m //绑定G和M mp.curg = gp gp.m = mp //更改G的状态 casgstatus(gp, _Grunnable, _Grunning) gp.waitsince = 0 gp.preempt = false gp.stackguard0 = gp.stack.lo + stackGuard if !inheritTime { //更新P的调度次数 mp.p.ptr().schedtick++ } //.... //执行G的任务 gogo(&gp.sched) } 可以看到execute的主要任务就是将当前的G和M进行绑定,即把G分配给这个线程M,然后调整它的状态为执行态,最后调用gogo方法完成对用户方法的运行。
2.3.3、mcall()
从2.3.2小节中我们知道,执行的execute函数完成了g0和g的切换,将对M的执行权交给了g,然后调用了gogo方法运行g。当需要重新将M的执行权从g切换到g0的时候,需要执行mcall()方法,完成切换。mcall()方法的作用我们在2.1小节中提到过,该方法是通过汇编语言实现的,主要的作用是完成了对g的栈信息的保存、将当前堆栈从g切换到g0、在g0的栈上执行mcall方法中传入的fn回调函数。
什么时候调用mcall(),就涉及到我们在2.2小节讲到了调度类型了。接下来我们通过源码一一分析。
1、主动调度
主动调度是提供给用户的让权方法,执行的是runtime包下的Gosched方法。
func Gosched() { checkTimeouts() mcall(gosched_m) } Gosched方法就调用了mcall,并且传入回调函数gosched_m。
// Gosched continuation on g0. func gosched_m(gp *g) { goschedImpl(gp, false) } func goschedImpl(gp *g, preempted bool) { //... casgstatus(gp, _Grunning, _Grunnable)// 将Goroutine状态从运行中更改为可运行状态 //... dropg()//解绑G和M lock(&sched.lock) globrunqput(gp)//将G放入到全局队列中,等待下一次的调度 unlock(&sched.lock) //... schedule()// 调用调度器,从全局队列或本地队列选择下一个Goroutine运行 } gosched_m完成了对G的状态的转换,然后调用dropg将M和G解绑,再将G放回到全局队列里面,最终调用schedule进行新一轮的调度。
2、被动调度
当当前G需要被被动调用的时候,就会调用goprak(),将其置为阻塞态,等待别人的唤醒。
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer, reason waitReason, traceReason traceBlockReason, traceskip int) { //... mcall(park_m) } // park continuation on g0. func park_m(gp *g) { mp := getg().m trace := traceAcquire() casgstatus(gp, _Grunning, _Gwaiting) //... dropg() //... schedule() } gopark内部调用了mcall(park_m),park_m将G的状态置为waiting,并且将M和G解绑,然后开启新一轮的调度。
进入等待的G需要被动的被其他事件唤醒,此时就会调用goready方法。
func goready(gp *g, traceskip int) { systemstack(func() { ready(gp, traceskip, true) }) } //ready 函数的作用是将指定的 Goroutine (gp) 标记为“可运行”状态并将其放入运行队列。它会在 Goroutine 从等待(_Gwaiting)状态转换为可运行(_Grunnable)状态时使用,以确保调度器能够选择并执行它。 // Mark gp ready to run. func ready(gp *g, traceskip int, next bool) { status := readgstatus(gp) // Mark runnable. mp := acquirem() // 获取当前线程(M),并禁止其被抢占,以避免将 P 错误地保留在本地变量中。 //确认G的状态 if status&^_Gscan != _Gwaiting { dumpgstatus(gp) throw("bad g->status in ready") } //... casgstatus(gp, _Gwaiting, _Grunnable) //.... //将该G放入到当前P的运行队列 runqput(mp.p.ptr(), gp, next) //检查是否有空闲的 P,若有则唤醒,以便它能够处理新加入的可运行 Goroutine。 wakep() //释放当前 M 的锁,以重新允许抢占。 releasem(mp) } ready方法会将G的状态重新切换成运行态,并且将G放入到P的运行队列里面。从代码中我们可以看到,被唤醒的G并不会立刻执行,而是加入到本地队列中等待下一次被调度。
3、正常调度
假如G被正常的执行完毕,就会调用goexit1()方法完成g和g0的切换。
func goexit1() { //... mcall(goexit0) } // goexit continuation on g0. func goexit0(gp *g) { gdestroy(gp) schedule() } 最终,协程G被销毁,并且开启新一轮的调度。
4、抢占调度
抢占调度最为复杂,因为它需要全局监控者m去检查所有的P是否被长期阻塞,这需要花时间去检索,而不能直接锁定到哪个P需要被抢占。全局监控者会调用retake()方法去检查,其流程如下:
//retake 函数用于在 Go 的调度器中处理一些调度策略,确保 Goroutine 的执行不被长时间阻塞。它通过检查所有的处理器 (P),尝试中断过长的系统调用并在合适的条件下重新夺回 P 的控制权。 func retake(now int64) uint32 { n := 0 lock(&allpLock) for i := 0; i < len(allp); i++ { pp := allp[i] if pp == nil { continue } pd := &pp.sysmontick s := pp.status sysretake := false if s == _Prunning || s == _Psyscall { //// 如果 `P` 的状态为 `_Prunning` 或 `_Psyscall`,则检查其运行时长。 t := int64(pp.schedtick) if int64(pd.schedtick) != t { pd.schedtick = uint32(t) pd.schedwhen = now } else if pd.schedwhen+forcePreemptNS <= now { //超过最大运行时间,抢占P preemptone(pp) //如果处于系统调用状态,`preemptone()` 无法中断 P,因为没有 M 绑定到 P。 sysretake = true } } if s == _Psyscall { // 如果 `P` 在系统调用中停留超过 1 个监控周期,则尝试收回。 t := int64(pp.syscalltick) if !sysretake && int64(pd.syscalltick) != t { pd.syscalltick = uint32(t) pd.syscallwhen = now continue } //如果当前P的运行队列为空,切存在至少一个自旋的M,并且未超出等待时间则跳过回收 if runqempty(pp) && sched.nmspinning.Load()+sched.npidle.Load() > 0 && pd.syscallwhen+10*1000*1000 > now { continue } // 为了获取 `sched.lock`,先释放 `allpLock` unlock(&allpLock) //回收操作... handoffp(pp) } } unlock(&allpLock) return uint32(n) } for i := 0; i < len(allp); i++ { pp := allp[i] if pp == nil { continue } 逐一的获取P,进行检查。
if s == _Prunning || s == _Psyscall { //// 如果 `P` 的状态为 `_Prunning` 或 `_Psyscall`,则检查其运行时长。 t := int64(pp.schedtick) if int64(pd.schedtick) != t { pd.schedtick = uint32(t) pd.schedwhen = now } else if pd.schedwhen+forcePreemptNS <= now { //超过最大运行时间,抢占P preemptone(pp) //如果处于系统调用状态,`preemptone()` 无法中断 P,因为没有 M 绑定到 P。 sysretake = true } } 当P的运行时间超过最大运行时间的时候,就会调用preemptone方法,尝试去抢占P。
值得注意的地方是,preemptone方法是设计成“尽力而为”的,因为并发的存在,我们并不能确保它一定能通知到我们需要解绑的G,因为可能会存在以下状况:
- 当我们尝试去发出抢占通知P上的G需要停止运行的时候,可能在发出通知的过程,这个G就完成运行,调用到下一个G了,我们可能会通知了错误的G。
- 当G进入到系统调用的状态的时候,P和M就会解绑,我们也通知不到G了。
- 就算通知到了目标的G,它也可能在执行newstack,此时会忽略请求。
因此,preemptone方法只会尝试在自己未和M解绑以及m上的g此时不是g0的情况下,将gp.preempt置为true,表示发出了通知便返回true。具体的抢占将可能会在未来的某一时刻发生。
if s == _Psyscall { // 如果 `P` 在系统调用中停留超过 1 个监控周期,则尝试收回。 t := int64(pp.syscalltick) if !sysretake && int64(pd.syscalltick) != t { pd.syscalltick = uint32(t) pd.syscallwhen = now continue } //如果当前P的运行队列为空,切存在至少一个自旋的M,并且未超出等待时间则跳过回收 if runqempty(pp) && sched.nmspinning.Load()+sched.npidle.Load() > 0 && pd.syscallwhen+10*1000*1000 > now { continue } // 为了获取 `sched.lock`,先释放 `allpLock` unlock(&allpLock) //回收操作... if atomic.Cas(&pp.status, s, _Pidle) { //.... handoffp(pp) } } 当满足以下三个条件的时候,就会执行抢占调度:
- p的本地队列有等待执行的G
- 当前没有空闲的p和m
- 执行系统调用的时间超过10ms
此时就会调用抢占调度,先将p的状态置为idle,表示可以被其他的M获取绑定,然后调用handoffp方法。
func handoffp(pp *p) { // handoffp must start an M in any situation where // findrunnable would return a G to run on pp. // if it has local work, start it straight away if !runqempty(pp) || sched.runqsize != 0 { startm(pp, false, false) return } // if there's trace work to do, start it straight away if (traceEnabled() || traceShuttingDown()) && traceReaderAvailable() != nil { startm(pp, false, false) return } // if it has GC work, start it straight away if gcBlackenEnabled != 0 && gcMarkWorkAvailable(pp) { startm(pp, false, false) return } // no local work, check that there are no spinning/idle M's, // otherwise our help is not required if sched.nmspinning.Load()+sched.npidle.Load() == 0 && sched.nmspinning.CompareAndSwap(0, 1) { // TODO: fast atomic sched.needspinning.Store(0) startm(pp, true, false) return } lock(&sched.lock) if sched.gcwaiting.Load() { pp.status = _Pgcstop sched.stopwait-- if sched.stopwait == 0 { notewakeup(&sched.stopnote) } unlock(&sched.lock) return } if pp.runSafePointFn != 0 && atomic.Cas(&pp.runSafePointFn, 1, 0) { sched.safePointFn(pp) sched.safePointWait-- if sched.safePointWait == 0 { notewakeup(&sched.safePointNote) } } if sched.runqsize != 0 { unlock(&sched.lock) startm(pp, false, false) return } // If this is the last running P and nobody is polling network, // need to wakeup another M to poll network. if sched.npidle.Load() == gomaxprocs-1 && sched.lastpoll.Load() != 0 { unlock(&sched.lock) startm(pp, false, false) return } // The scheduler lock cannot be held when calling wakeNetPoller below // because wakeNetPoller may call wakep which may call startm. when := nobarrierWakeTime(pp) pidleput(pp, 0) unlock(&sched.lock) if when != 0 { wakeNetPoller(when) } } 当我们满足以下情况之一的时候,就会为当前的P新分配一个M进行调度:
- 全局队列不为空或者本地队列不为空,即有可以运行的G。
- 需要有trace去执行。
- 有垃圾回收的工作需要执行。
- 当前时刻没有自旋的线程M并且没有空闲的P(表示当前时刻任务繁忙)。
- 当前P是唯一在运行的P,并且有网络事件等待处理。
当满足五个条件之一的时候,都会进入到startm()方法中,为当前的P分配一个M。
func startm(pp *p, spinning, lockheld bool) { mp := acquirem() if !lockheld { lock(&sched.lock) } if pp == nil { if spinning { } pp, _ = pidleget(0) if pp == nil { if !lockheld { unlock(&sched.lock) } releasem(mp) return } } nmp := mget() if nmp == nil { id := mReserveID() unlock(&sched.lock) var fn func() if spinning { fn = mspinning } newm(fn, pp, id) if lockheld { lock(&sched.lock) } releasem(mp) return } //... releasem(mp) } if pp == nil { if spinning { } pp, _ = pidleget(0) if pp == nil { if !lockheld { unlock(&sched.lock) } releasem(mp) return } } 假如传入的pp是nil,那么会自动设置为空闲p队列中的第一个p,假如仍然为nil表示当前没有空闲的p,会退出方法。
nmp := mget() if nmp == nil { id := mReserveID() unlock(&sched.lock) var fn func() if spinning { fn = mspinning } newm(fn, pp, id) if lockheld { lock(&sched.lock) } releasem(mp) return } 然后会尝试获取当前的空闲的m,假如不存在则新创建一个m。
至此,关于GMP模型的节选部分的讲解就完成了,可能有许多我理解的不对的地方欢迎大家讨论,谢谢观看。





